Ų¹▄ć┐╔ęįöÓ└mŲäėŻ¼Ą½Ū░╠ß╩Ūę¬į┌Öz£y¤oŪ·▌SĘĮ├µå¢Ņ}ęį║¾ĪŻŲ¹▄ć╩╣ė├Š▀ėąļŖę║²X▌åōQō§Ą─F1─Ż╩ĮŻ¼═©▀^³c╗ķ_ĻPŲäėŪ·▌S├³┴ŅŻ¼═©▀^┐žųŲöÓ┬ĘŲ„║═īŻė├Ū·▌S└^ļŖŲ„Ż¼╩╣╦³│╔×ķé„▌ö┐žųŲå╬į¬ĪŻų╗ėą«öTCUęŌūRĄĮūį╝║Ą─░▓╚½▓┼Ģ■ŲäėŻ¼╚╗║¾░l╦═Ū·▌Są┼╠¢Ż©žō╠°ūāŻ®ĮoŪ·▌Sé„ĖąŲ„Ż¼╦∙ęįėą║▄ČÓå¢Ņ}ę¬┐╝æ]ĪŻ
═©▀^ī”▄ć▌v▀MąąČÓ┤╬£yįćŻ¼ųĖ│÷ø]ėą├„’@Ą─å¢Ņ}ĪŻ┴╝║├Ą─ļŖ│žļŖē║Ż¼┴╝║├Ą─ŲäėĒææ¬Ż¼┐┤╦Ų┴╝║├Ą─Ū·▌S▐D╦┘ĪŻį┌└õĄ─ŁhŠ│Ž┬ī”░läėÖC▀Mąą£yįćŻ¼╚╗║¾═Żų╣▀\ąąę╗Ģ■ā║┐┤╩Ūʱ▀\ąą£žČ╚╩Ūę╗éĆå¢Ņ}Ż¼Ą½ŅÖ┐═Ą─═ČįV▓ó▓╗į┌┤╦ĪŻĄĮ┴╦▀@ļAČ╬Ż¼Ų¹▄ćĄ─ļŖ│žķ_╩╝╩▄ĄĮė░ĒæŻ¼╦∙ęį┐┤╔Ž╚źĘ┬Ęø]ėą╩▓├┤å¢Ņ}Č°░čŲ¹▄ćĮ╗Įo▄ćų„ĪŻ
╬©ę╗╩ŻŽ┬ę¬Öz▓ķĄ─╩ŪŻ¼═©▀^╩Š▓©Ų„▓ČūĮŲäėļŖÖC▓┘ū„Ą─▓©ą╬ĪŻę╗éĆ║├Ą─╚½├µÖz▓ķĄ─╩Ū┐┤ļŖÖCļŖ┴„ī”ļŖ┤┼ĶFäŅ┤┼Ą─ū„ė├Ż¼ę“×ķ╦³╩Ūėąė├Ą─Ż¼┐┤▀@ą®ę“╦žķgĄ─ŽÓ╗źū„ė├ĪŻ×ķ┴╦½@Ą├ūŅ£╩┤_Ą─ļŖ┤┼ķyļŖį┤ļŖē║Ą─ėøõøŻ¼╩š╝»▀@ą®ĮėĮ³Ųäėčbų├▒Š╔ĒĄ─öĄō■īó╩Ūę╗éĆ║▄║├Ą─ų„ęŌŻ¼Ą½╩Ūįōå╬į¬╩Ū░▓čbį┌äė┴”é„äėŽĄĮyĄū▓┐ĪŻ▀M╚ļąĶꬥ╚┤²ę╗éĆéõė├═©Ą└Ż¼╚╗║¾ęŲĄ¶š¹éĆ░läėÖC┼ōŻ¼▀@╩Ūį┌└╦┘MĢrķgĪŻį┌▀@éĆė╬æ“ųąėąę╗éĆ║Ńē║į\öÓąĶę¬ūĘŪ¾Ģrķgą¦┬╩ĪŻą┼╠¢ėøõøāx═∙═∙└’├µėą┤¾┴┐Ą─öĄō■Ż¼╚ń╣¹Ęų╬÷š²┤_Ż¼┐╔ęįŽ¹│²ę╗éĆĮM╝■╣╩šŽ╗“ūC├„▀@ę╗³cĪŻ
ī”ė┌▀@éĆ▄ćą═Ż¼ę╗éĆĘeśOĄ─Ęų▓╝╩ĮļŖ│žĮM░▓čbį┌ū¾é╚ū∙╬╗║¾Ż¼═©▀^╣®ļŖļŖ└|║═ŲäėŲ„ŽÓ▀BŻ¼į┌▀@└’▀ĆįOėąŲäėäŅ┤┼ļŖ└|ĪŻųžę¬Ą─╩Ū▀Ćū„×ķŲäėļŖÖCįć“ץ─╬╗ų├ĪŻ
▀@╩ŪĮY╣¹ĪŻ═©Ą└AŻ©╦{╔½Ż®š²į┌▒O£yļŖ┤┼ķyļŖį┤ļŖē║║══©Ą└BŻ©╝t╔½Ż®š²į┌▒O£yļŖÖCļŖ┴„ĪŻ▀@éĆėąą®Õeš`ĪŻ
ūī╬ęéā┐┤┐┤═¼ę╗▓ČūĮĄ─Ė³ČÓ╝Ü╣ØĪŻ
į┌▓Č½@Ą─š¹¾wĮYśŗųą░³║¼š²│Żą┼╠¢Ą─╚▒╩¦į┌š¹éĆŪ·▌S╩┬╝■ųąĪŻ▓╗▀^Ż¼Ė·█Ö╚į’@╩Š│÷š²│ŻŲäėļŖÖC▀\ąąĄ─ūRäe╣”─▄ĪŻ
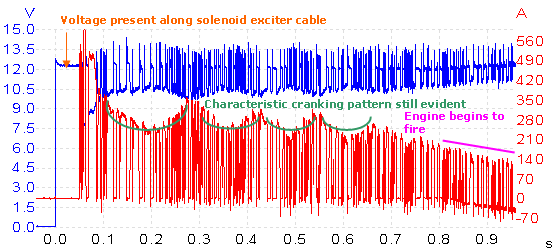
▓Č½@ķ_╩╝ė┌ļŖ┤┼ŲäėŲ„Įė╩š12Ę³ļŖ┤┼ą┼╠¢ĪŻ▀@ĻPķ]┴╦ā╚▓┐Ą─┬ōŽĄŻ¼═¼Ģr╩╣ąĪ²X▌åŽ▌╚ļ’w▌åŠWĮj║═╠ß╣®ļŖ│žļŖē║ĮoļŖÖCĄĮķ_╩╝▐DäėĪŻšłūóęŌ╝s50msĄ─čė▀tį┌äŅ┤┼Ę┤ü║═ļŖÖCļŖ┴„ų«ķgŻ║▀@╩ŪļŖ┤┼Ēææ¬ĢrķgĪŻ╚╬║╬ķLĄ─čė▀tį┌▀@└’īó▒Ē├„Ż¼ļŖ┤┼ŠĆ╚”š²į┌Įė╩šļŖē║Ż¼Ą½ļŖÖCĘ┤æ¬╦┘Č╚▓╗ē“┐ņŻ¼┐╔─▄Ą─įŁę“░³└©ā╚▓┐Ą─ļŖ┤┼Įėė|▓╗┴╝╗“┐╔─▄░läėÖCĄž├µĄ└┬ĘĄ─å¢Ņ}ĪŻ▀Mę╗▓Į▓╔╝»┐╔ę╔öĄō■Ż¼ī”┬▌ŠĆ╣▄ļŖ┴„Ž¹║─▀MąąĘų╬÷Ż¼ęį┴╦ĮŌ╩ŪʱėąūŃē“Ą─┤┼ł÷š²į┌╔·│╔ĪŻ«ö╚╗Ż¼▀@ų╗╩Ūę╗éĆ└²ūėŻ¼ę“×ķ▀@└’čė▀tĢrķg╩Ūš²│ŻĄ─ĪŻ
Ū·▌S─Ż╩Į║▄╚▌ęū┐┤ĄĮļŖÖCųąĄ─ļŖ┴„▓©ą╬ĪŻ╬ęéāš²į┌īżšęĄ─ę╗éĆ┴╝║├Ą─▓ČūĮ╩ŪŽÓī”ŲĮ╗¼Ą─║═╔§ų┴ėą╝ŌĘÕĄ─į┌▄ē█EųąŻ¼├┐éĆÜŌĖūėąę╗éĆĘÕųĄŻ¼«ö╦³ĮėĮ³TDCĢrį┌ē║┐s╔ŽĪŻėąę╗éĆŠÅ║═Ą─ļŖ┴„«ö±R▀_═Ų▀M╗Ņ╚¹ĢrŻ¼╚╗║¾ę╗éĆĖ³┤¾Ą─ļŖ┴„░ķļS╗Ņ╚¹Ą─ē║┐sąą│╠║═ļŖÖCę¬╝ė▒Č┼¼┴”ē║┐sŪ╗ā╚Ą─╚╝┴Ž/┐šÜŌ╗ņ║Ž╬’ĪŻ
▀@éĆ║åå╬ĮŌßīĄ─▒│║¾╩Ūę╗éĆĖ³╝ėįö╝ÜĄ─└ĒšōŻ¼ļŖÖCļŖ┴„╚ń║╬╚ĪøQė┌ŲõÖCąĄžō║╔ĪŻ║åčįų«Ż¼ļŖÖCäōĮ©ļŖäėä▌Ż©EMFŻ®Ż¼į÷╝ė╦┘Č╚Ż¼Ę┤ĘĮŽ“Įo╦³╣®æ¬ļŖē║ĪŻ▀@éĆĘ┤Ž“ļŖäėä▌£pąĪ┴╦┴„ĄĮļŖÖCĄ─ļŖ┴„ĪŻįĮ╩Ū╚╬äšųžĄ─ļŖÖCžō▌dŻ¼╦³▀\ąąĄ─╦┘Č╚▌^┬²Ż¼╦∙ęįėąąĪĄ─Ę┤Ž“ļŖäėä▌║═Ė³Ė▀Ą─ļŖ┴„ĪŻ├┐éĆÜŌĖūĄ─ē║┐sų▒ĮėŲź┼õ├┐éĆļŖ┴„ĘÕųĄŻ¼ę╗éĆ├„’@Ą═Ż¼Ė▀╗“▓╗Š∙ä“Ą─Ė▀ĘÕæ¬╠ßĖ▀ĻPė┌ÜŌĖūĄ─ē║┐są¦┬╩å¢Ņ}ĪŻ╦³ę▓┐╔ęįūRäeĪóĖ·█ÖĪó’@╩ŠŪ·▌Sųą╚╬║╬ėąå¢Ņ}ÜŌĖūŠĆ╚”Ą─ą┼╠¢Ż¼¼Fį┌ų╗╩ŪĖ∙ō■ļŖ┴„ĘÕųĄĄ─öĄō■ėŗ╦ŃŪ·▌SĪó░läėÖCĄ─³c╗Ēśą“Ż¼ų▒ĄĮšęĄĮ┐╔ę╔ÜŌĖūĪŻė╔ė┌ėą┴╝║├Ą─▓╔śėĘČć·Ė·█Ö║═┴╝║├ļŖ┴„╠ĮŅ^Ż¼─ŃĢ■¾@ŲµĄž░l¼F▀@ĘN╝╝ąg┐╔ęį£╩┤_Ąž▓ņėXØōį┌Ą─å¢Ņ}Ż¼Ą½╬ęĮ^▓╗Ģ■šJ×ķ▀@─▄╚Ī┤·ÖCąĄē║┐s║═ÜŌĖūą╣┬®Öz▓ķĪŻ
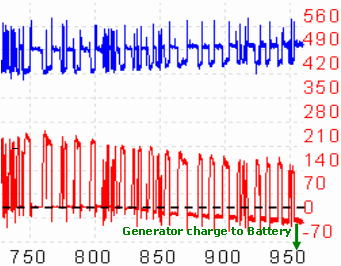
ūŅ║¾Ż¼╬ęéā┐┤ĄĮ┴╦ļŖ┴„ą┼╠¢Ž┬ĮĄĄĮžōųĄĄ─┐é¾w┌ģä▌ĪŻ▀@╩Ūę“×ķŻ¼«ö░läėÖC³c╗ĢrŻ¼ļŖ┴„╩ŪÅ─░lļŖÖC┴„Ž“ļŖ│žŻ¼ļŖÖCļŖ┴„│╔Ę┤ĘĮŽ“ĪŻ«öļŖÖCļŖ┴„öÓ└mĄžŽ┬ĮĄĄĮ┴ŃŻ¼▀@ā╔éĆļŖ┴„Ą─┐é║═ūā×ķžōöĄĪŻō■╗∙▒ŠįŁ└Ē┐╔ęį┐┤│÷Ż¼į┌£yįć³cöĄō■ęč▒╗ėøõø▀Ć░³└©░lļŖÖCĄ─▌ö│÷ĪŻ
▀@└’╩Ū▓ČūĮĄĮ▓©ą╬Ą─Ė³įö╝Ü’@╩ŠĄ─ūŅ║¾ę╗▓┐ĘųĪŻį┌£yįćŪ░Ż¼ļŖ┴„╠ĮŅ^╬óš{ĄĮ0AŻ¼Å─Č°╩╣╚╬║╬ļŖ┴„Ą─£y┴┐Č╝ęį0×ķųąą─ĪŻ
Ģ║▓╗┐╝æ]äŅ┤┼ŠĆ╚”Ą─ļŖē║▄ē█EĪŻļSų°±R▀_▐DäėŻ¼ļŖ┴„ūį╚╗üĒūįļŖ│žŻ¼į┌▀@└’ļŖ┴„’@╩Š×ķš²śOąįĪŻ═╗╚╗Ż¼░läėÖCķ_╩╝³c╗║═░lļŖÖCķ_╩╝░lļŖęįŽÓĘ┤ĘĮŽ“čžų°═¼ę╗ļŖ└|ĪŻ╠ĮŅ^╩░╚Ī║═╬ęéā┐┤ĄĮį┌0┐╠Č╚ŠĆ┴Ēę╗é╚│÷¼F┴╦ļŖ┴„ųĄŻ¼▀@╩Ū░läėÖC╗žü─▄┴┐ĮoļŖ│žĪŻ
╚ń╣¹ī”▓Č½@ĄĮĄ─▓©ą╬ūą╝ÜĘų╬÷Ą─įÆŻ¼ļŖ│žļŖ┴„Ą─ĘÕĘÕųĄ╩┬īŹ╔Ž┬įėąŽ┬ĮĄŻ¼ļSų°ļŖäėÖC½@Ą├ę╗▓┐ĘųÅ─░lļŖÖC┴„═∙ļŖ│žĄ─ļŖ┴„ĪŻ«ö╚╗Ż¼ė╔ė┌ļŖ│žŻ¼ŲäėļŖÖC║═░lļŖÖCų«ķgĄ─ŽÓ╗źĻPŽĄį┌Ū·▌S▀\äėŲ┌ķg░l╔·Ą─║▄┐ņŻ¼╦∙ęįø]ėą░lļŖÖC▀^▌dĄ─╬ŻļUĪŻ▀@╩ŪįŁę“ų«ę╗Ż¼×ķ╩▓├┤░lļŖÖC«a╔·ų╗▒╚š²│ŻĄ─Ū·▒·▐D╦┘┬įĖ▀Ą─ļŖ┴„ĪŻ
š{▓ķĄ──┐Ą─▐DŽ“ą┼╠¢Ą─╚▒╩¦ĪŻę¬š²┤_šJūR▓Č½@Ą─ą┼╠¢Ż¼╬ęéāąĶę¬╠ßąčūį╝║Ż¼╬ęéāš²į┌蹊┐ėąĻPĄ─ŲäėļŖÖC▒Š╔ĒĪŻ
Ž┬ę╗Ēō >>>
|